Publications
2025
-
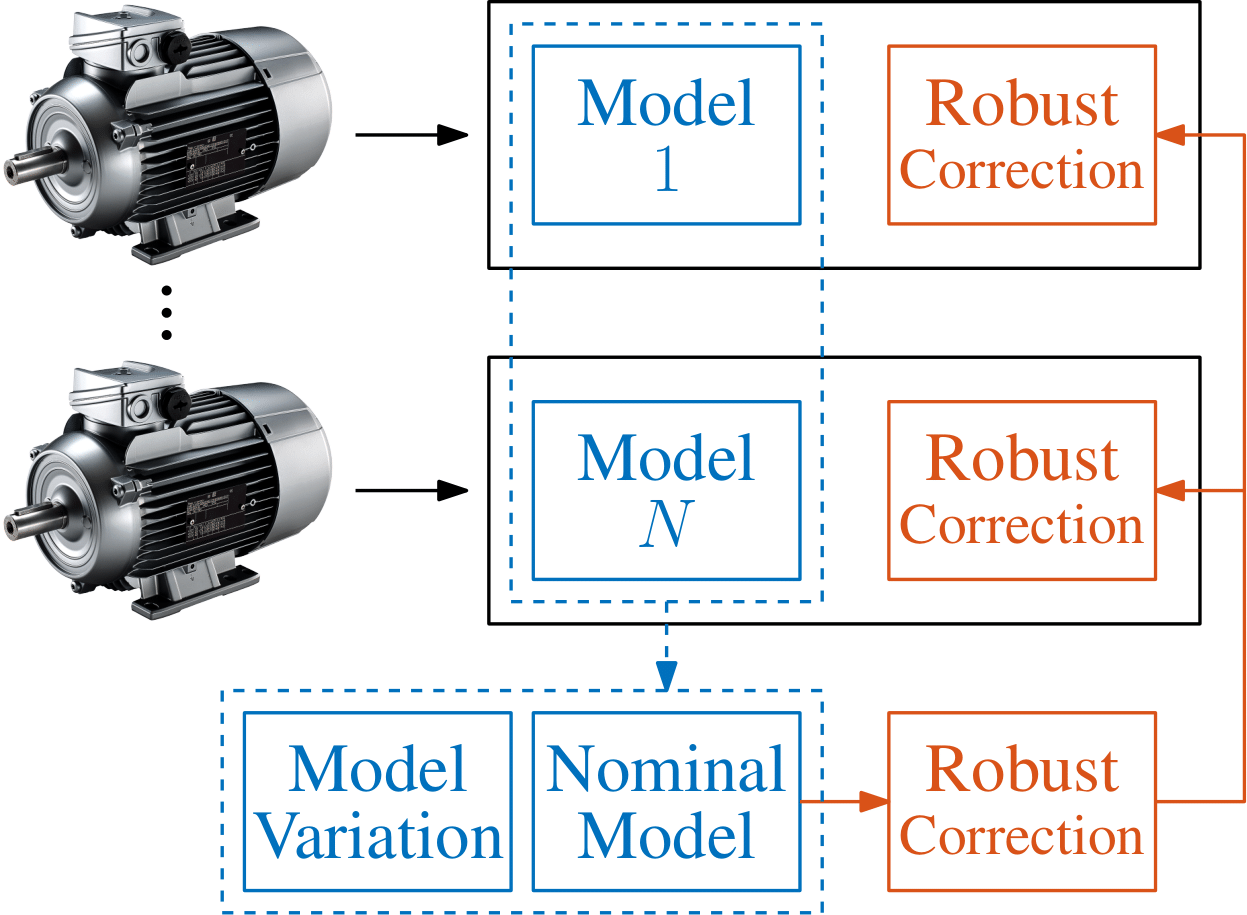 Design of Input-Output Observers for a Population of Systems With Bounded Frequency-Domain Variation Using DK-IterationTimothy Everett Adams and James Richard ForbesSep 2025
Design of Input-Output Observers for a Population of Systems With Bounded Frequency-Domain Variation Using DK-IterationTimothy Everett Adams and James Richard ForbesSep 2025This letter proposes a linear input-output observer design methodology for a population of systems in which each observer uses knowledge of the linear time-invariant dynamics of the particular device. Observers are typically composed of a known model of the system and a correction mechanism to produce an estimate of the state. The proposed design procedure characterizes the population variation in the frequency domain and synthesizes a single robust correction filter. The correction filter guarantees a level of estimation performance for all systems compatible with the uncertainty characterization. This is accomplished by posing a robust performance problem using the observer error dynamics and solving it using DK -iteration. The design procedure is experimentally demonstrated on a flexible joint robotic manipulator with varied joint stiffnesses. It is shown that the proposed robust correction filter achieves comparable estimation performance to a method using a correction gain tailored toward each joint stiffness configuration.
@article{adamsDesignInputOutputObservers2025, title = {Design of {{Input-Output Observers}} for a {{Population}} of {{Systems With Bounded Frequency-Domain Variation Using DK-Iteration}}}, author = {Adams, Timothy Everett and Forbes, James Richard}, year = {2025}, month = sep, journaltitle = {IEEE Control Systems Letters}, volume = {9}, pages = {2645--2650}, issn = {2475-1456}, doi = {10.1109/LCSYS.2025.3638270}, url = {https://ieeexplore.ieee.org/document/11271285}, urldate = {2026-03-07}, selected = true, bibtex_show = true } -
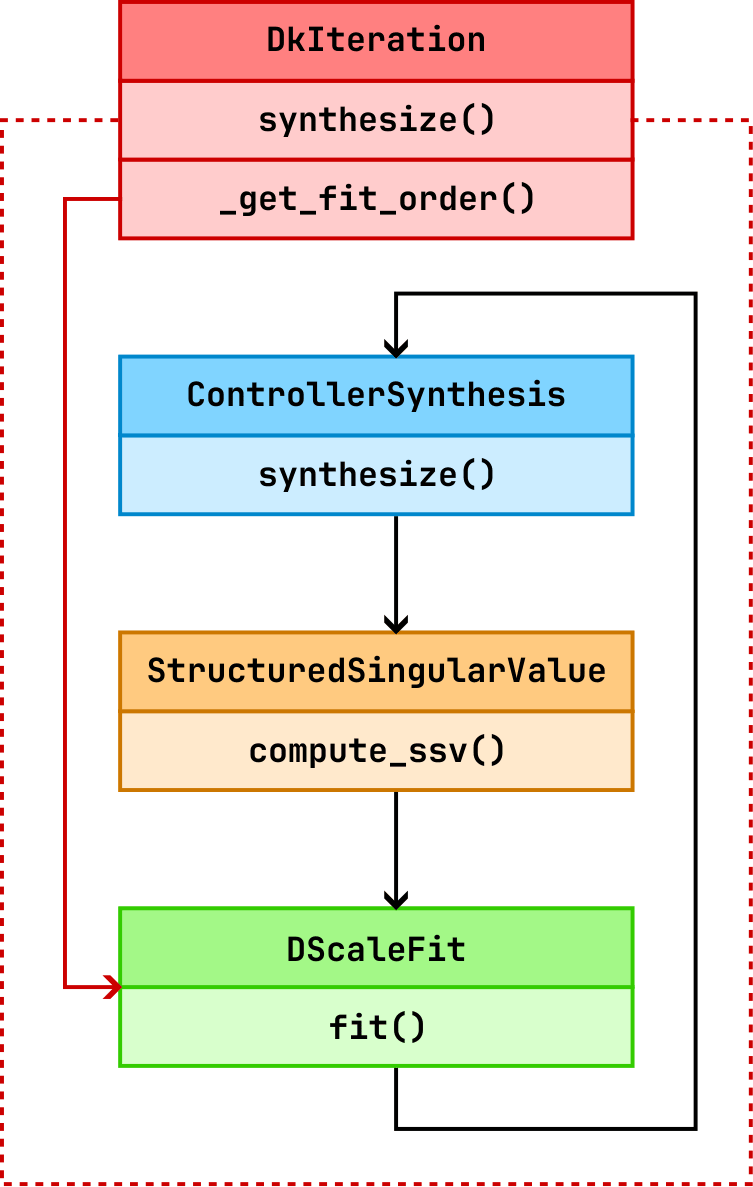 Dkpy: Robust Control with Structured Uncertainty in PythonTimothy Everett Adams, Steven Dahdah, and James Richard ForbesNov 2025
Dkpy: Robust Control with Structured Uncertainty in PythonTimothy Everett Adams, Steven Dahdah, and James Richard ForbesNov 2025Models used for control design are, to some degree, uncertain. Model uncertainty must be accounted for to ensure the robustness of the closed-loop system. μ-analysis and μ-synthesis methods allow for the analysis and design of controllers subject to structured uncertainties. Moreover, these tools can be applied to robust performance problems as they are fundamentally robust control problems with structured uncertainty. The contribution of this paper is dkpy, an open-source Python package for performing robust controller analysis and synthesis for systems subject to structured uncertainty. dkpy also provides tools for performing model uncertainty characterization using data from a set of perturbed systems. The open-source project can be found at https://github.com/decargroup/dkpy.
@online{adamsDkpyRobustControl2025, title = {Dkpy: {{Robust Control}} with {{Structured Uncertainty}} in {{Python}}}, author = {Adams, Timothy Everett and Dahdah, Steven and Forbes, James Richard}, year = {2025}, month = nov, eprint = {2511.13927}, eprinttype = {arXiv}, eprintclass = {eess}, doi = {10.48550/arXiv.2511.13927}, url = {http://arxiv.org/abs/2511.13927}, urldate = {2026-03-07}, pubstate = {prepublished}, selected = true, bibtex_show = true }